Beauty Of Algorithms 17 Summary. HashTable
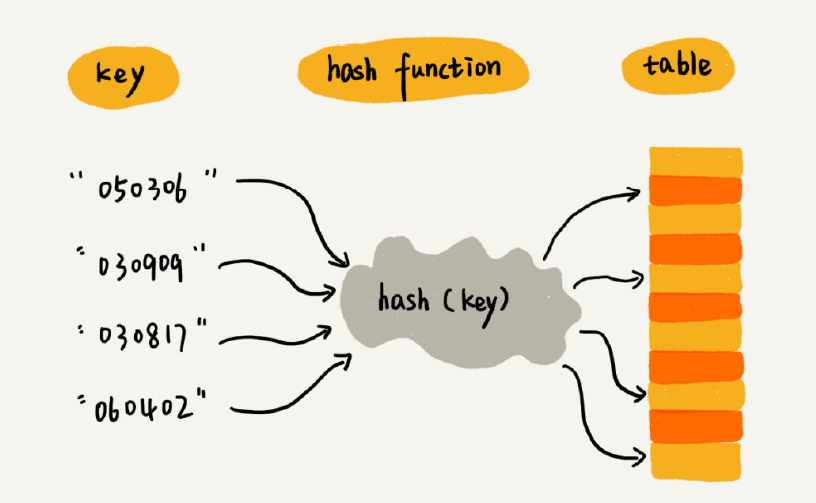
散列表Hash Table来源于数组,它借助散列函数对数组这种数据结构进行扩展,利用的是数组支持按照下标随机访问元素的特性。
需要存储在散列表中的数据我们称为键key,将键转化为数组下标的方法hash(key)称为散列函数,散列函数的计算结果称为散列值。
将数据存储在散列值对应的数组下标位置。
设计散列函数
设计散列函数的基本要求
散列函数计算得到的散列值是一个非负整数。
若key1=key2,则hash(key1)=hash(key2)。
若key≠key2,则hash(key1)≠hash(key2)。
当空闲位置越来越少,散列值冲突的概率越来越大,也就无法满足第三条。
散列冲突的解决方法
开放寻址法
线性探测
开放寻址法会导致占用删除元素的位置,这样会导致原来的算法失效。
所以线性探测法的删除操作是将要删除的元素标记为deleted,当要插入数据时遇到这种位置就继续向下探测。
二次探测
线性探测法每次探测的步长为1,即在数组中一个一个探测,比如hash(key)+1,hash(key)+2…
而二次探测的步长变为原来的平方hash(key)+1^2,hash(key)+2^2…
双重散列
使用一组散列函数,先使用第一个,如果有冲突就换下一个,直到找到空闲位置为止。
性能描述
我们使用装载因子来表示空位多少:
1 | 散列表的装载因子 = 填入表中的元素个数 / 散列表的长度 |
装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
链表法
插入数据
当插入的时候,我们需要通过散列函数计算出对应的散列槽位,将其插入到对应的链表中即可,所以插入的时间复杂度为O(1)
查找或删除数据
对于散列比较均匀的散列函数,链表的节点个数k=n/m,其中n表示散列表中数据的个数,m表示散列表中槽的个数。当查找、删除一个元素时,通过散列函数计算对应的槽,然后遍历链表查找或删除,两操作与链表长度k成正比,即时间复杂度为O(k)。

思考
假设我们有10万条URL访问日志,如何按照访问次数给URL排序
遍历 10 万条日志,将 URL 做为 KEY ,声明一个访问次数 count 作为散列表值,存入散列表,每次遇到重复的 count++ ,然后对散列表值进行桶排序或者快速排序。
有两个字符串数组,每个数组大约有10万条字符串,如何快速找出两个数组中相同的字符串
将其中一个数组以字符串为 KEY, 默认值 value 为 0 存入散列表。然后用第二个数组的元素为 KEY 遍历这个散列表,如果找到相同的KEY ,那么 value +1 ,最后统计 value>0 的所有 KEY.
散列表碰撞攻击
在极端情况下,有些恶意的攻击者,还有可能通过精心构造的数据,使得所有的数据经过散列函数之后,都散列到同一个槽里。
如果我们使用的是基于链表的冲突解决方法,那这个时候,散列表就会退化为链表,查询的时间复杂度就从 O(1) 急剧退化为 O(n)。
散列函数的设计
- 散列函数的设计不能太复杂。过于复杂的散列函数,势必会消耗很多计算时间,也就间接的影响到散列表的性能
- 散列函数生成的值要尽可能随机并且均匀分布,这样才能避免或者最小化散列冲突,而且即便出现冲突,散列到每个槽里的数据也会比较平均,不会出现某个槽内数据特别多的情况
- 实际工作中,我们还需要综合考虑各种因素。这些因素有关键字的长度、特点、分布、还有散列表的大小等。
- 散列函数的设计方法有很多:数据分析法、直接寻址法、平方取中法、折叠法、随机数等等
装载因子
装载因子越大,散列表中的元素越多,空闲位置越少,散列冲突的概率就越大。
插入数据的过程要多次寻址或者拉很长的链,查找的过程也会变得很慢。
动态散列表的数据集合是频繁变动的,我们事先无法预估数据个数,无法事先申请一个足够大的散列表。
数据慢慢加入,装载因子就会慢慢变大,当装载因子大到一定程度之后,散列冲突变得不可接受。
当装载因子过大时,我们可以进行动态扩容,重新申请一个更大的散列表,将数据搬移到这个新散列表中。
假设每次扩容我们都申请一个原来散列表大小两倍的空间。如果原来散列表的装载因子是 0.8,扩容之后新散列表的装载因子就下降为原来的一半变成了 0.4。
避免低效地扩容
当装载因子已经到达阈值,需要先进行扩容,再插入数据。这个时候,插入数据就会变得很慢,甚至会无法接受。
举一个极端的例子,如果散列表当前大小为 1GB,要想扩容为原来的两倍大小,那就需要对1GB 的数据重新计算哈希值,并且从原来的散列表搬移到新的散列表。
为了解决一次性扩容耗时过多的情况,我们可以将扩容操作穿插在插入操作的过程中,分批完成。
当装载因子触达阈值之后,我们只申请新空间,但并不将老的数据搬移到新散列表中。
当有新数据要插入时,我们将新数据插入新散列表中,并且从老的散列表中拿出一个数据放入到新散列表。
每次插入一个数据到散列表,我们都重复上面的过程。
经过多次插入操作之后,老的散列表中的数据就一点一点全部搬移到新散列表中了。
对于查询操作,为了兼容了新、老散列表中的数据,我们先从新散列表中查找,如果没有找到,再去老的散列表中查找。
散列冲突解决方法
开放寻址法
- 优点
- 散列表中的数据都存储在数组中,可以有效地利用 CPU 缓存加快查询速度。
- 种方法实现的散列表,序列化起来比较简单。链表法包含指针,序列化起来就没那么容易
- 缺点
- 在开放寻址法中,所有的数据都存储在一个数组中,比起链表法来说,冲突的代价更高
- 使用开放寻址法解决冲突的散列表,装载因子的上限不能太大
- 这种方法比链表法更浪费内存空间
当数据量比较小、装载因子小的时候,适合采用开放寻址法。
这也是 Java 中的 ThreadLocalMap 使用开放寻址法解决散列冲突的原因。
链表法
- 优点
- 链表法对内存的利用率比开放寻址法要高。因为链表结点可以在需要的时候再创建,并不需要像开放寻址法那样事先申请好。实际上,这一点也是我们前面讲过的链表优于数组的地方。
- 链表法比起开放寻址法,对大装载因子的容忍度更高。开放寻址法只能适用装载因子小于 1 的情况。接近 1 时,就可能会有大量的散列冲突,导致大量的探测、再散列等,性能会下降很多。但是对于链表法来说,只要散列函数的值随机均匀,即便装载因子变成 10,也就是链表的长度变长了而已,虽然查找效率有所下降,但是比起顺序查找还是快很多
- 缺点
- 链表因为要存储指针,所以对于比较小的对象的存储,是比较消耗内存的,还有可能会让内存的消耗翻倍
- 而且,因为链表中的结点是零散分布在内存中的,不是连续的。所以对 CPU 缓存是不友好的,这方面对于执行效率也有一定的影响
当如果我们存储的是大对象,即存储的对象的大小远远大于一个指针的大小。那么链表中指针的内存消耗在大对象面前就可以忽略了。
链表法比起开放寻址法,它更加灵活,支持更多的优化策略,比如用红黑树代替链表。
工业级散列表举例分析
初始大小
HashMap 默认的初始大小是 16,这个默认值是可以设置的。可以通过修改默认初始大小,减少动态扩容的次数,这样会大大提高 HashMap 的性能。
装载因子和动态扩容
最大装载因子默认是 0.75,当 HashMap 中元素个数超过 0.75*capacity(capacity 表示散列的容量)的时候,就会启动扩容,每次扩容都会扩容为原来的两倍大小。
散列冲突解决方法
HashMap 底层采用链表法来解决冲突。即使负载因子和散列函数设计得再合理,也免不了会出现拉链过长的情况,一旦出现拉链过长,则会严重影响 HashMap 的性能。
于是,在 JDK1.8 版本中,为了对 HashMap 做进一步优化,我们引入了红黑树。而当链表长度太长(默认超过 8)时,链表就转换为红黑树。当红黑树结点个数少于 8 个的时候,又会将红黑树转化为链表。
散列函数
1 | int hash(Object key) { |
hashCode() 返回的是 Java 对象的 hash code。
比如 String 类型的对象的 hashCode() 就是下面这样:
1 | public int hashCode() { |
如何设计的一个工业级的散列函数?
如果这是一道面试题或者是摆在你面前的实际开发问题,从哪几个方面思考呢
结合已经学习过的散列知识,我觉得应该有这样几点要求:
- 支持快速的查询、插入、删除操作
- 内存占用合理,不能浪费过多的内存空间
- 性能稳定,极端情况下,散列表的性能也不会退化到无法接受的情况
如何实现这样一个散列表呢?根据前面讲到的知识从这三个方面来考虑设计思路
- 设计一个合适的散列函数
- 定义装载因子阈值,并且设计动态扩容策略
- 选择合适的散列冲突解决方法
散列表和链表组合使用
LRU缓存淘汰算法
借助散列表,我们可以把LRU缓存淘汰算法的时间复杂度降为O(1)。
一个缓冲cache系统主要包含以下操作
- 往缓存中添加一个数据
- 从缓存中删除一个数据
- 在缓存中查找一个数据
单纯采用链表,时间复杂度只能是O(n)。
将散列表和双向链表结合,就可以降为O(1),其结构如下图所示:
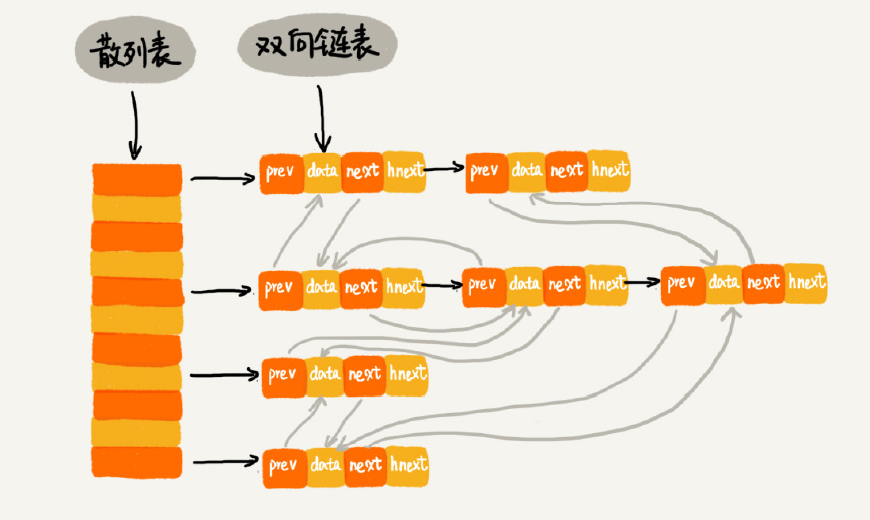
其中,我们使用双向链表存储数据,data存储数据,prev前驱指针,next后继指针。
此外,新增加了hnext指针,这个指针就是链表法散列表中的拉链的后继指针。
如何做到O(1)
查找
因为是散列表所以查找一个数据的操作时间复杂度就接近于O(1)
删除
删除一个数据,我们借助散列表再O(1)的时间复杂度里找到该结点,而双向链表有前驱指针,可以直接删除该节点,时间复杂度为O(1)
添加
添加一个数据比较复杂,首先要看其是否已经在缓存中,如果在就将其移动到双向链表的尾部,如果不在就检查缓存满了没,满了就删除双向链表的头结点,再将数据放到双向链表的尾部,如果没有满就直接将数据放大双向链表的尾部
以上操作中,设计查找的操作是散列表完成的,删除节点、插入节点是双向链表完成的,所以时间复杂度是O(1)。
Redis有序集合
在有序集合中,每个成员对象有两个重要的属性,键key和分值score。
我们不仅需要key来查找数据,还会需要用score查找数据。
细化一下Redis有序集合的操作:
- 添加一个成员对象
- 按照键值来删除一个成员对象
- 按照键值来查找一个成员对象
- 按照分值区间查找数据,比如查找积分在[100, 356] 之间的成员对象
- 按照分值从小到大排序成员变量
如果只按照分支将成员对象组织成跳表的结构,那么按照键值删除、查询对象就会很慢。
我们可以按照键值构建一个散列表,这样按照key来删除、查找一个对象的时间复杂度就都变成了O(1)。
Java中的LinkedHashMap
Java 中的LinkedHashMap中的Linked并不是链表法表示散列表的意思,而是双向链表和散列表结合。
LinkedHashMap本身就是一个支持LRU缓存淘汰策略的缓存系统,其数据的存取移动删除规则和LRU一样。
思考
今天讲的几个散列表和链表结合使用的例子里,我们用的都是双向链表。如果把双向链表改成单链表,还能否正常工作呢?为什么呢?
不能,影响查询性能
假设猎聘网有 10 万名猎头,每个猎头都可以通过做任务(比如发布职位)来积累积分,然后通过积分来下载简历。
假设你是猎聘网的一名工程师,如何在内存中存储这 10 万个猎头 ID 和积分信息,让它能够支持这样几个操作:
根据猎头的 ID 快速查找、删除、更新这个猎头的积分信息
ID 为 KEY,散列表可以实现快速查询,链表法可以实现删除更新。
查找积分在某个区间的猎头 ID 列表
遍历散列表查询积分对应的 ID 列表
查找按照积分从小到大排名在第 x 位到第 y 位之间的猎头 …
遍历散列表